Sistema Inteligente do Controle do Fluxo de Semáforo para Veículos e Pedestres
Participantes:
Waldyr ReisResumo do projeto:
A proposta de projeto é o Controle de Semáforo, observando conceitos e prioridades como: Pedestres, Deficientes, Veículos de Utilidade Pública (Ambulância, Policia, Bombeiro), utilizando os recursos a nós oferecidos e agregando sensores e sistemasDescrição do projeto:
O Projeto
O sistema tem o objetivo de controlar o fluxo de
veículos, veículos especiais (Ambulância, Bombeiros e Policia),
pedestres, pedestres com deficiência e outros fatores que
vivenciamos todos os dias em um grande cruzamento. O projeto
por questões de tempo será implementado e terá como modelo
um único cruzamento.
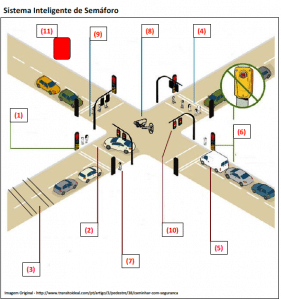
1 – Display Eletrônico Informativo (Pedestre)
2 – Faixa de Pedestre
3 – Sensores no solo próximo ao cruzamento
4 – Sensores tipo barreira infra vermelho
5 – dispositivos embarcados em veículos especiais (Ambulância, Bombeiro e Policia)
6 – Display para os veículos
7 – Pedestre com algum tipo de deficiência
8 – Câmeras de vigilância
9 – As condições de travessia
10 – Os faróis terão iluminação inteligente
11 – O Sistema Central
Histórico do desenvolvimento:








22/10/2018 – Montagem da Maquete e estruturas para iniciar os testes do conjunto .
1a – Case da DragonBoard
1b – Antena do sistema Xbee
1c – Semáforos, faróis de pedestre e detecção de faixas
1d – Controlador dos semáforos e sistemas secundários
1e – Identificador pessoal e de veículos prioritários
*** Falta as interligações, displays informativos e lombada de velocidade
*** Integração na Nuvem


09/10/2018 – Controlador dos Semáforos de Veículos e pedestre prontos, esse sistema também vai controlar os sensores das faixas de pedestre. Todos os comandos serão recebidos e enviados através da rede XBee que terá seu sistema central baseada na DragonBoard 410C.
Obs. Estamos concluindo o video do teste do controlador do Semáforo .
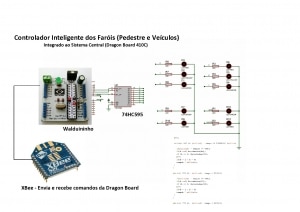
02/10/2018 – Projeto do Controlador dos faróis (Hardware e Software) – Sistema sem fio integrado a o sistema central que é composto pela DragonBoard

28/09/2018 – Montagem da maquete para a instalação dos sensores , faróis, sistemas de controle e etc. (Falta os detalhes na maquete para melhorar o aspecto – Prédios, casas árvores e etc.)
25/09/2018 – Desenvolvimento do sistema secundário (Software e Hardware) que ira gerenciar os faróis e sensores da via para transmitir para o sistema principal

19/09/2018 – Preparando o Software para que ele faça a integração das GPios com os sensores do cruzamento.
19/09/2018 – Iniciamos o hardware que vai possibilitar a leitura dos sensores do cruzamento para serem enviados para as GPios da DragonBoard.
18/09/2018 – A DragonBoard ja esta recebendo informações dos identificadores pessoais e de veículos especiais através da rede Xbee e controlada via Python3.
15 e 16/09/2018 – Estudamos a placa e o kit para identificar a forma mais rapida de iniciarmos o projeto.
14/09/2018 – Recebemos o kit de desenvolvimento DragonBoard 410C (Obrigado !!!)

09/09/2018 – Alterações no hardware e na versão do firmware do modelo de identificador pessoal e veicular que será utilizado no projeto.
27/08/2018 – Desenvolvemos os módulos que exercem a função de identificador pessoal e para identificar os veículos prioritários.
05/09/2018 – Aguardando o recebimento do kit Quectel para integrar os identificadores
Hardware:
Kit de desenvolvimento DragonBoard 410C.
Xbee Serie 2.
Micro Controladores para os identificadores pessoais e veicular.
Interface I/O – Hardware Próprio.
Software/Firmware:
Python3
C
Firmware próprio para rede Xbee
Linux